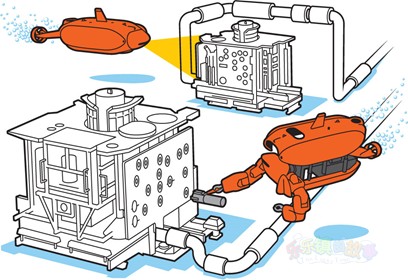
休斯顿机电一体化公司开发了一个水下机器人Aquanaut,它可以变形——从流线型的潜艇形变为“仿人形”,集AUV和ROV于一身,以适应不同的任务需求。
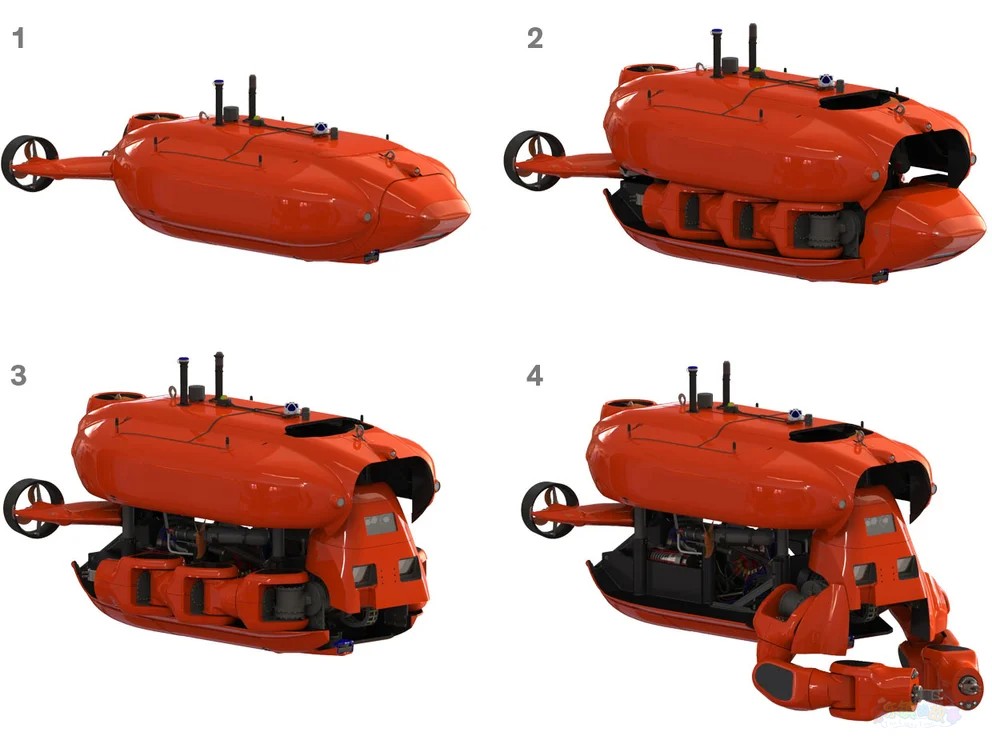
1. Aquanaut以流线型潜艇模式驶往海底工作区。
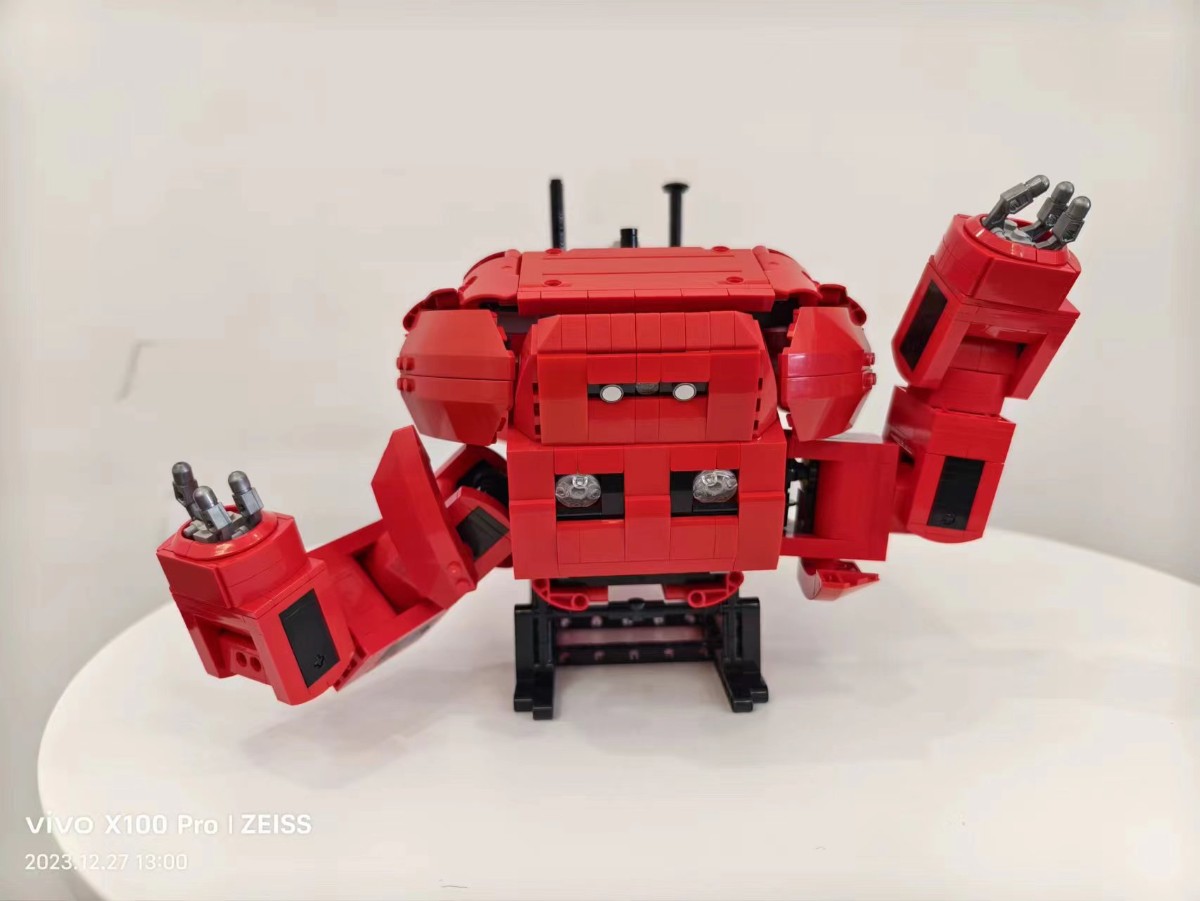
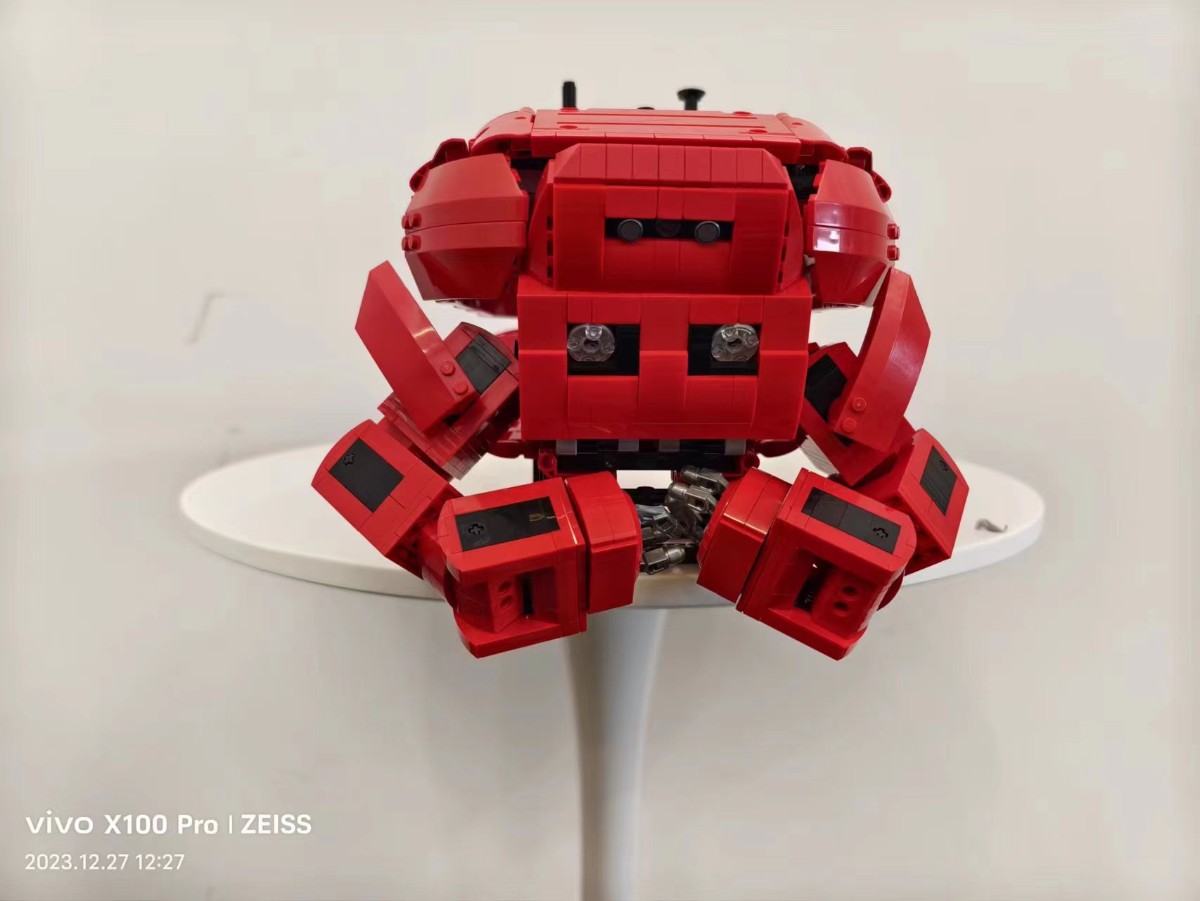
2. 一旦到达现场,外壳顶部就会升起,露出两个巨大的手臂和一个楔形的头部。
3. 头部旋转到位。头部装有立体摄像头、3D传感器和声纳系统。
4. 展开强壮的手臂。手臂装备了力传感器和爪状抓手。
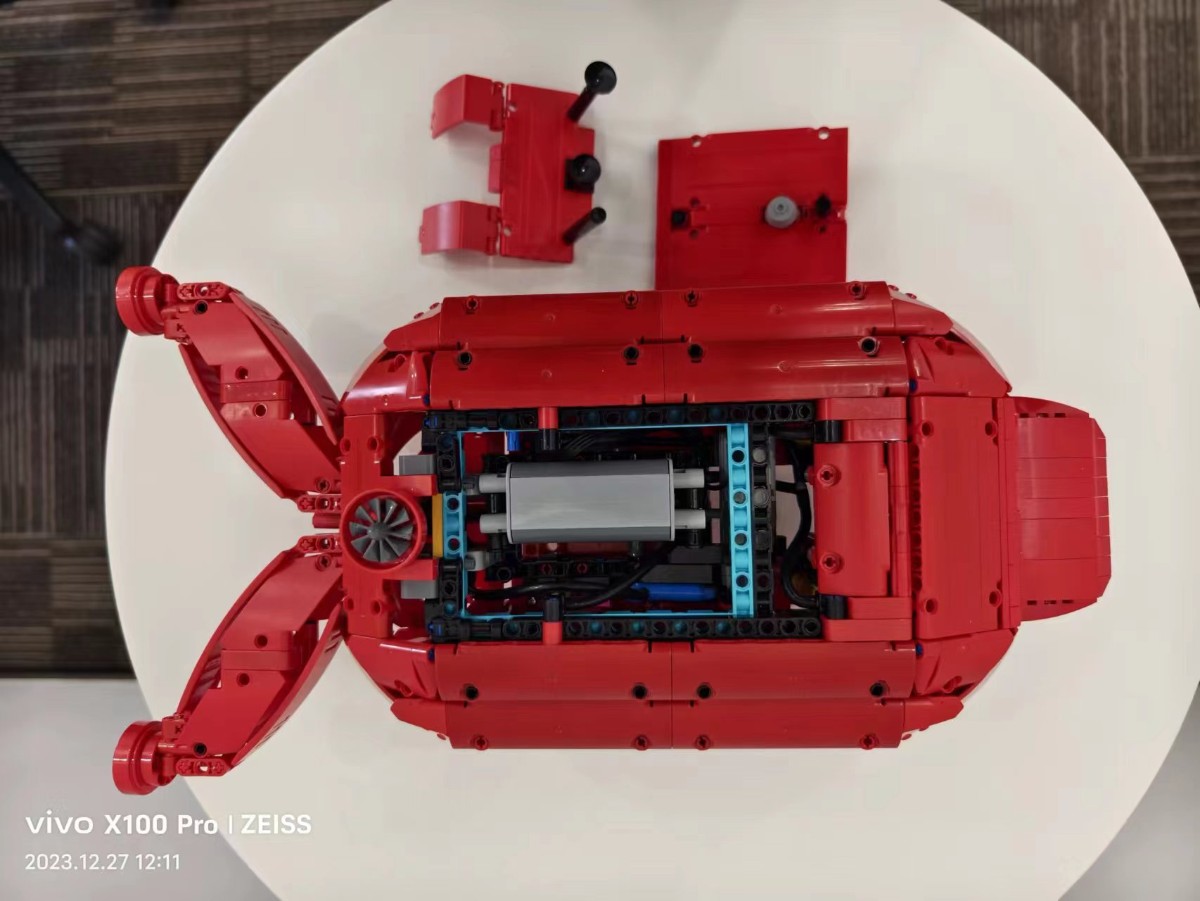
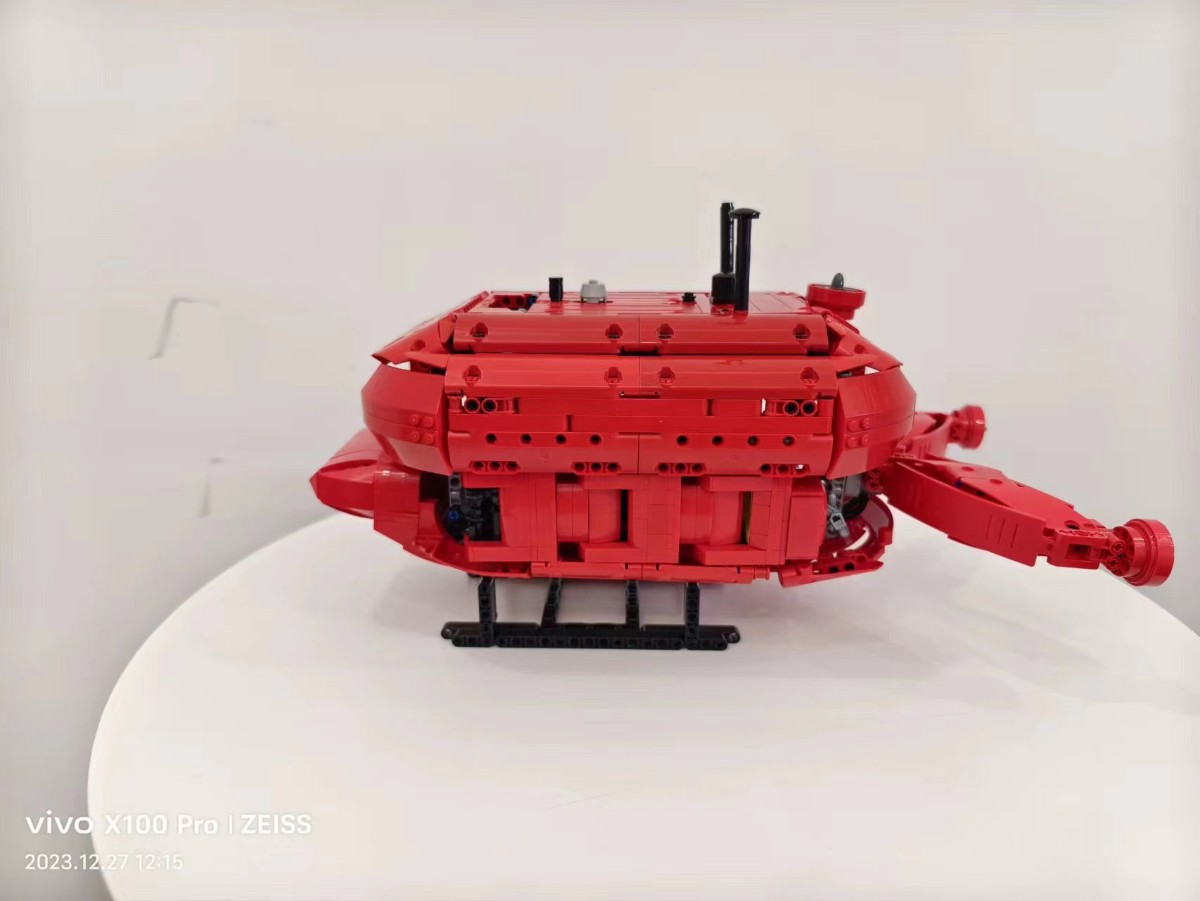
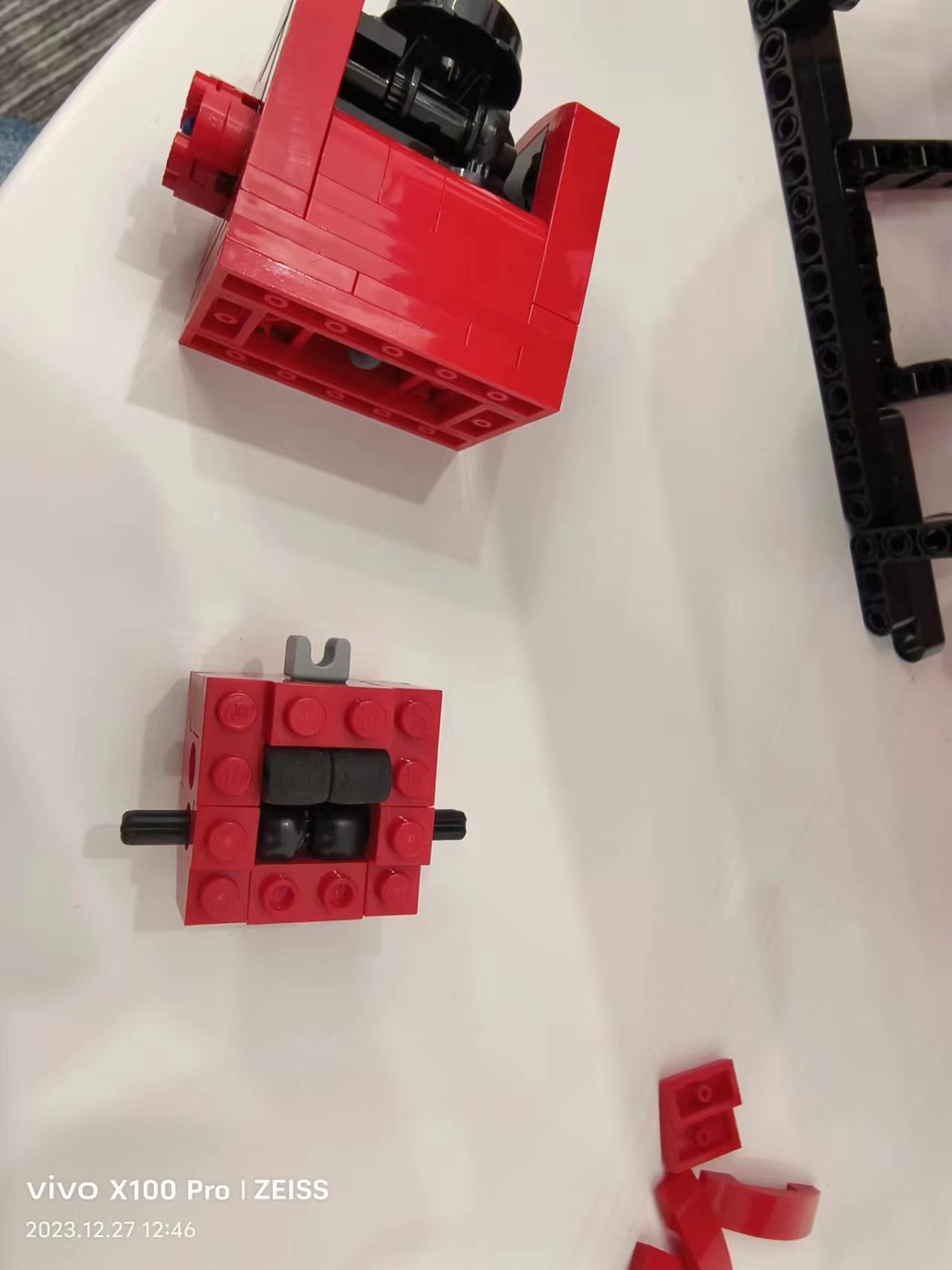
可旋转头部快拆手臂与手臂橡胶关节