Delta Robot is one of Parallel Robot:
Delta机器人是一种并联机器人:
请点击图片,观看演示视频。

Parallel robot uses several serial chains to support a single platform, or end-effector. The end effector (hand) of this linkage (arm)
is directly connected to its base by a number of separate and independent linkages working simultaneously.
并联机器人的终端同时被多个轴直接连接。
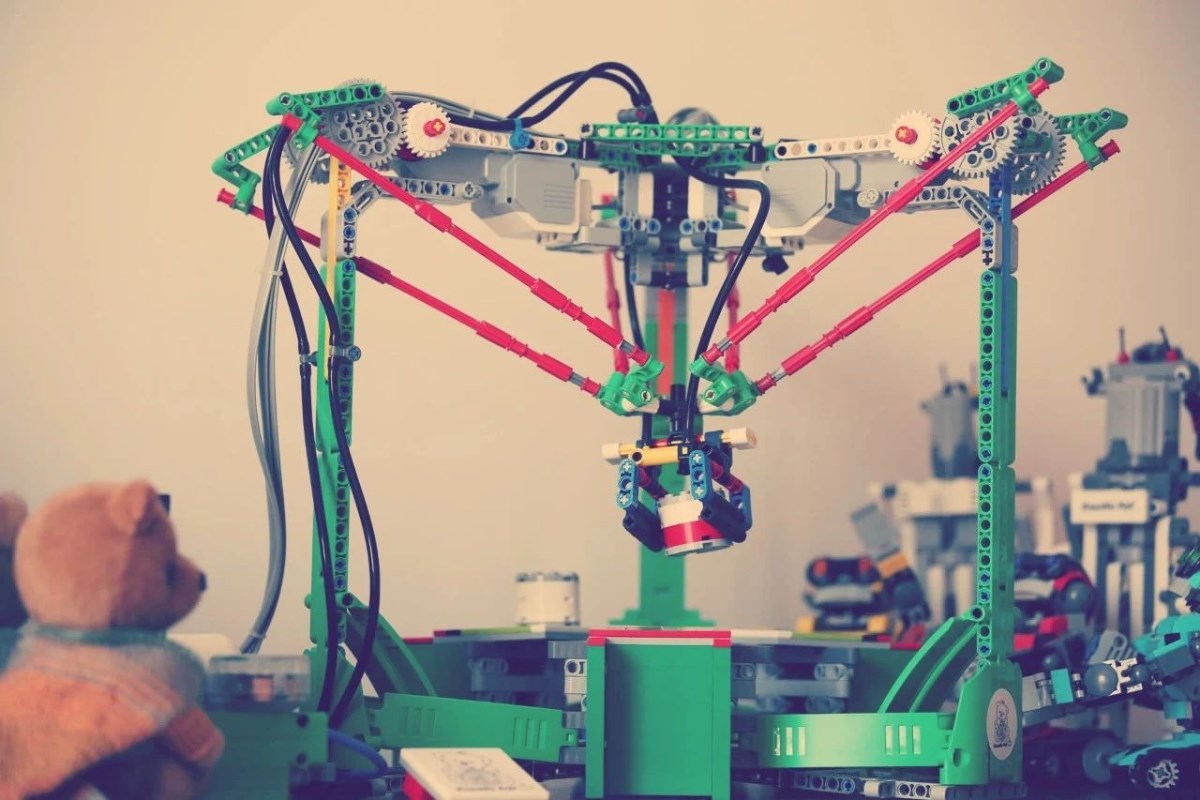
A Parallel robot arm is designed so that each chain is usually short, simple and can thus be rigid against unwanted movement. The
off-axis flexibility of a joint is also constrained by the effect of the other chains.
并联机器人手臂的各轴相对较短并互相制约,可以避免误动作。

Errors in one chain's positioning are averaged in conjunction with the others.
并联机器人各轴的误差不会被累计,而是被平均。
A further advantage of the Parallel robot arm is that the heavy actuators may often be centrally mounted on a single base platform.
This reduction in mass along the arm permits a lighter arm construction, thus lighter actuators and faster movements. This
centralisation of mass also reduces the robot's overall moment of inertia.
并联机器人手臂的终端重量被各个轴共同分担,因此其总体质量较轻,可以实现较快的运动速度并减小惯性。
A drawback of Parallel robot arm is their limited workspace.
并联机器人的工作空间有限。
Another drawback of Parallel robot arm is their nonlinear behavior: the command which is needed for getting a linear or a circular
movement of the end-effector depends dramatically on the location in the workspace and does not vary linearly during the movement.
并联机器人的运动轨迹是非线性的,因此在设计其控制指令时,需要综合线性和环形两种运动。